マイクロロボ製作でちっちゃいマイコンでモニタなどが
ないと何かとデバッグとか不便です。PCとシリアル通信なんかが
よく使われますが有線だと何かとマイクロロボには使い勝手がよくないので
最初に無線通信できるようにしてます。
高性能マイコンならBLE,ESPNOWなどの電波モノが位置の制約などなくて
いいのですが消費電力が大きいです。
通信の一瞬だけ送受信機能を動かす・・・でそこそこ低消費電流にはできますが
それでも高性能マイコンは消費電力が大きい。
クロック落としたらそこそこ減るけど無線が使えなくなったり。。。
で、低消費電力型8bitマイコン です。
でもって低消費電力で簡単な通信だと赤外線シリアル通信なんかは
割とお気に入りです。
テレビリモコンなどの赤外線受信機を利用すればノイズ処理なんかが
だいぶ手間省けていい感じにできます。
テレビリモコンなどの38kHzのバンドパス受信ICは
小さいモノだとこちらのが使いやすいです。
フツーの赤外線受信ICが20円程なの 少々お高い?です120円
赤外線送信の方は適当に受信機の波長に合わせたモノならなんでも行けます。
上記のは940nm。 10個100円程度であります。
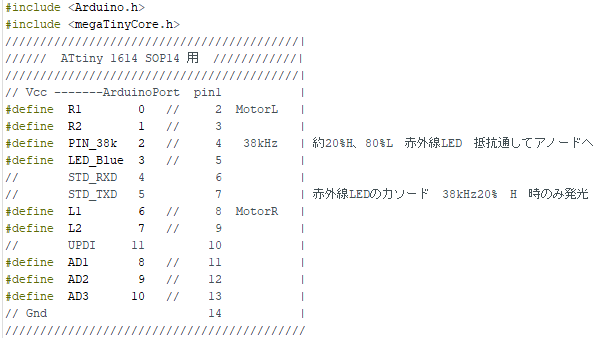
Attiny1614のピン使用設定は 現在こんな感じ
以前のレゴ ミニフィグで紹介した・・・はず なんだけど
どこかぱっと見つからない。。。 ので再掲
やっぱし整理の仕方がいまいち。。。備忘録になってない...
赤外線通信も凝ったことな何もしてない。
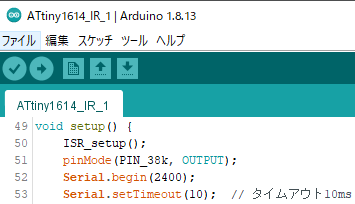
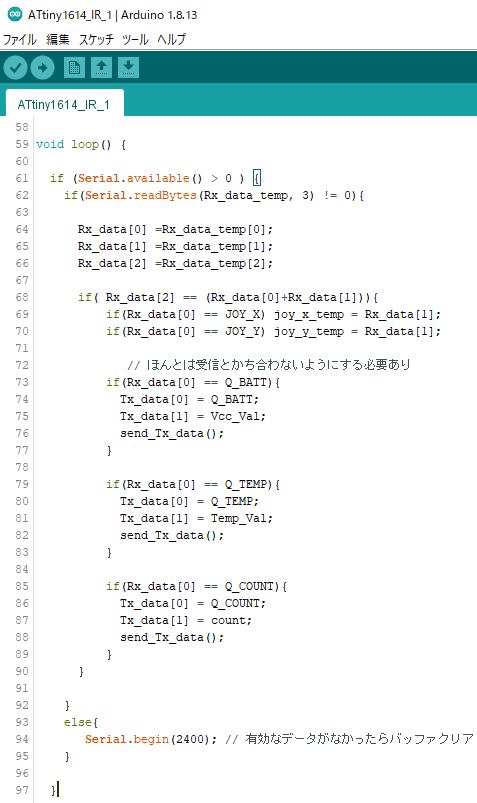
べた書きでこんな感じ。
設定
送受信
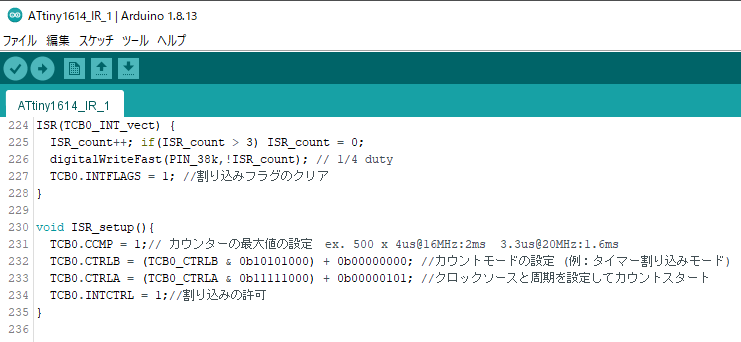
38kHz搬送波の割込み
ちょっと気を遣う?のはdigitalWrite Fastを付けないとポート叩くの遅い。
ビット演算で処理負荷減らす・・・とかも してない...
これは25%duty送信 レジスタの設定 細かいところは忘れた・・・
マニュアルは日本語であるけれど・・・
https://ww1.microchip.com/downloads/jp/DeviceDoc/40001893B_JP.pdf
・・・で、
モータの駆動の様子を見てる感じがこちら
スマホとM5Stack スタックチャンとはBLE
スタックチャンとAttinyは赤外線シリアル通信
マイクロロボ製作 スタックチャン式
— しん (@shinichi_nin) 2024年4月13日
マイコン動作モニタ その3
#ブラシレスモーター
ポートダイレクトでモータ駆動テスト
回転速度モニタ機能追加#スタックチャン #M5Stack #BLE #赤外線シリアル通信 #ATtiny1614 #3レベルインバータ #ベクトル制御 #PWM制御 #ATtiny1614 #BLE pic.twitter.com/pfXCOMoPqt
次はフォトリフレクタのテストかな。






















