今回の進捗はスマホラジコン
先回は2個のステッピングモータを
マイコンポートで直接駆動を2個できるまで作って、
電源供給を電池駆動で動作確認した。
この時は回転動作をプログラムで作り込みパターンで
ハーフ位相ステップを100msから3msまで順に繰り返しの
固定パターン動作だった。
今回はこれをスマホで操縦できるようにしてみた。
以前のミクちゃんとぱっと見はやってること同じになるんだけど
前はステッピングモータをモータドライバDRV8830でI2Cで2個動かしてた
位相パターンを電圧指令だけでPWM制御はDRV8830が勝手に
やってくれるので電力制御は簡単だった。
今回は直接ポートを駆動してのステッピングモータ駆動なので
前よりちょいと複雑。
普通のステッピングモータドライバの場合、
ステップ進める時のパルスを入れるだけでいいけど
3レベルインバータ動作なので
ポートの出力モードはOUTPUTでのHIGH・・・・3.3V
と、 INPUT(オープン、ハイインピーダンス)・・・約1/2x3.3V
と、 OUTPUTでのLOW・・・0V
を使う。これをハーフステップで切り替える。
さらに電力制御ではタイマーPWMで刻む。。。
でもこれをやれば軽負荷なら普通出力制御4本必要な
バイポーラステッピングモータを2本で駆動できる。
こういうのは学校で教えてくれない。教える必要もない...かな^^
うちの若い衆にはこういうこともできるんだよって話したりする。
やってることの原理は大電力、高電圧インバータ制御で
素子耐圧が電源電圧に足りなくて分けたりするのと同じ。
これが微小電力で、3.3V電源ではLEDで2Vドロップ品辺りを使うと
いい感じに2直で短絡電流流さず中性点を作り込める。ってところ。
これは趣味工作遊びでやってるけどちょっと検索しても見当たらないので
微小電力系でスイッチング素子低減、駆動回路簡素化で特許は取れそう。でも、
権利を使ってなんかやるってとこの需要があまりないだろうからあまり意味ない...
あー話がそれた。なんだったっけ。
そう、3レベルで作ったモータ駆動2つをスマホでラジコン
ESP8266は低電力無線はBLEが使えない。ESPNOWしかない。
スマホはESPNOWなんて使えない。低電力ならBLE。
なので以前やってたM5StickCでの中継をまたやった。
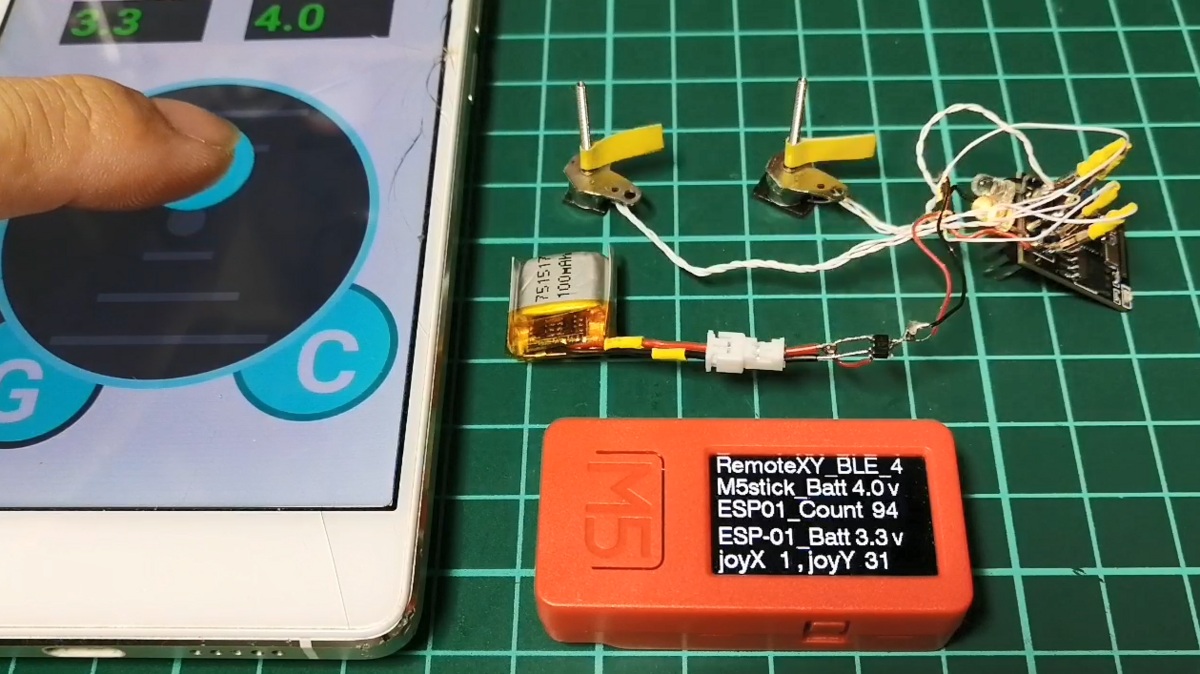
構成は
スマホ ⇐BLE⇒ M5StickC ⇐ESPNOW⇒ ESP-01
ってなる。
ここはそれなりに以前作ったやつの流用。
で動かしたのがこんな感じ。
あとはこれをまとめていったら小さいロボカー出来上がり かな。
あーまだ超信地旋回を組んでない。
モータドライバ使わず
— しん (@shinichi_nin) 2023年4月13日
マイコンポートで直接 #ステッピングモーター を
シンプルに駆動 続き...
先回からの進捗は...
スマホでモータ制御ラジコン
スマホ ⇐#BLE⇒
#M5StickC で中継
⇐#ESPNOW⇒ #ESP8266#M5Stack #Arduino #RemoteXY pic.twitter.com/cHLMs2XnRY