Pushタイプの構造で引きバネにしたら跳躍力はよくなった。。。
けど、バランスはまだまだ悪い。
高くジャンプしたらバク転になっていく。
これでは着地が全然まともにできない。
フライホイールジャイロで安定させるにはまだ無理がありすぎる。
構成的には電気モノ臓物のあるお腹側が重い。
でもここから背中側にモノ持って行くのはしんどい。
カムとかPushロッドとかの可動部と干渉しないようにするのは
構造が複雑になっていく・・・それって重くなってくし...
スペース的なこと とバランスを大きく変更するのはバッテリーの
移動しかない。
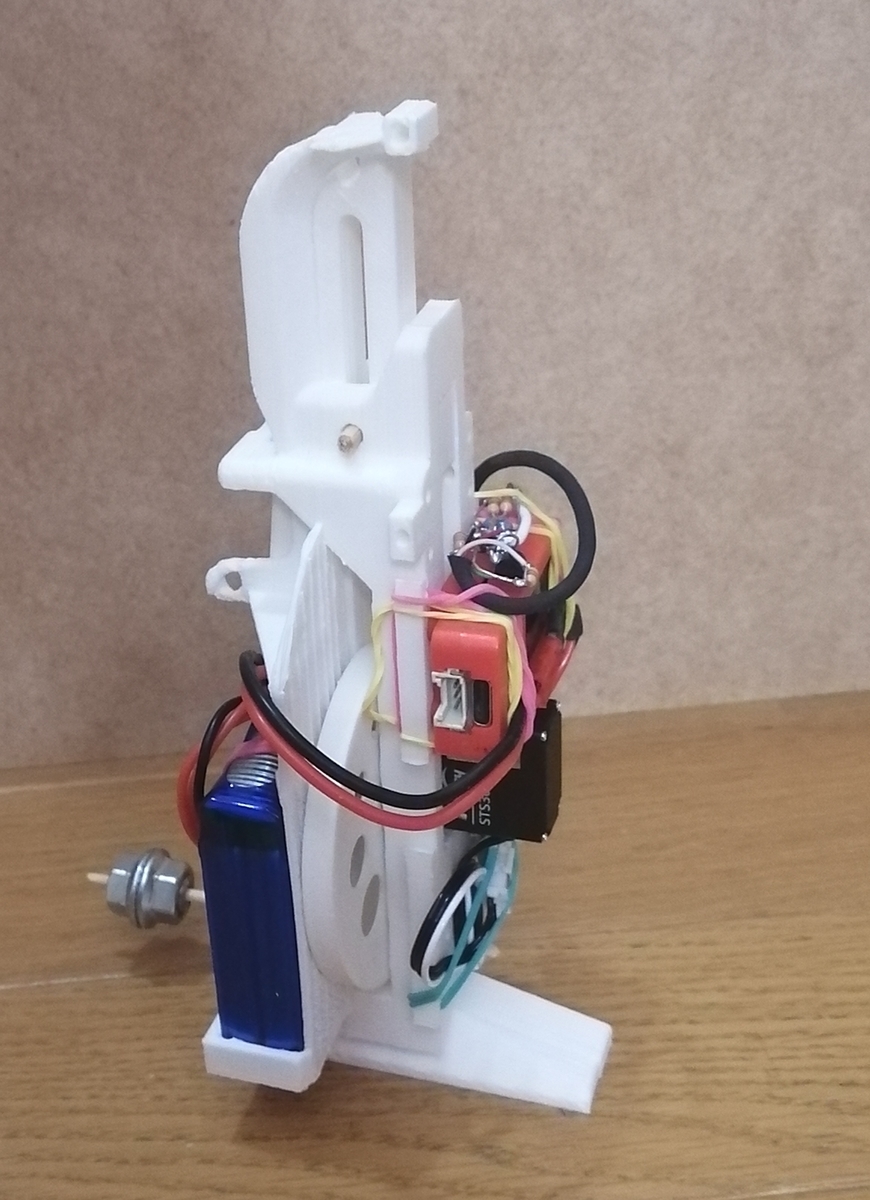
背中側にバッテリーを詰めるようにした。。。
直近にカムがあって、Pushロッドが来るのでギャップはどんだけ取るかってのが
悩ましいところ。ガタやらたわみやら造形精度もそんなによくないので。
フレームの設計はこれで一旦試してみることにした。

でもって出来上がった構造体はこんな感じ。
半二重通信回路も時間あれば基板で作りたいとこ...
カムとフレーム、カムと電池Boxはギリギリを攻めてじゃなくて、
当たる・・・当たっていい設計にした。
サーボホーンをサーボ軸に止めるネジも廃止。
レースでのフローティングディスクと同様?の
フローティングサーボホーンカムってところ。
鳥殻を付けるとこんな感じ。 半身だけ。

オリジナルのちぃぺんちゃんの鳥殻と一緒に。

フレームだけでのジャンプテスト
輪ゴム4個でバランス調整したらこんな感じ。
ほぼ着地も直立状態。約25cmのジャンプ

また鳥殻や、毛皮着たりするとバランスが取り切れるかわからんけど
うまく取れたら足裏にゲルと輪っかとか付けるだけでジャンプ高さは落ちるけど
跳ねなくて転ばないようにできるかもしれない。
バランスを見直す設計変更を行った。
— しん (@shinichi_nin) 2022年10月18日
フレームだけでのジャンプではあるけど姿勢は安定。
鳥殻、毛皮つけてもこんな感じでジャンプできればいいのだけど。#シリアルサーボ #STS3032 #M5stickC #Arduinohttps://t.co/BG2HuKhXyF pic.twitter.com/V5WYtcfFCB
バッテリー移設だけではバランスが取り切れなかったんで
調整用のアーム(竹串)にナット(M8フランジナット2個、13g)おもりを付けて、
ナット位置を変える、ねじ込んだり でバランスの調整をできるようにした。
重量は170gにまで増えた・・・
フライホイールジャイロを付けると姿勢保持が出来そうだけど
重心上に付けるとこはない。お腹の下、頭の中つけたらまたバランスが崩れる。
バランスおもりのとこにモータ、フライホイールジャイロ付けるのもちょいと
しんどい。さて どうしたものか...