スティックくん・・・M5Stickを使って
制御について学ぶ 。。。をもっと詳しくいろいろ紹介してみましょうって
話があって整理してる。
倒立振子ロボの前に、ライントレースロボの紹介はどうでしょって話。
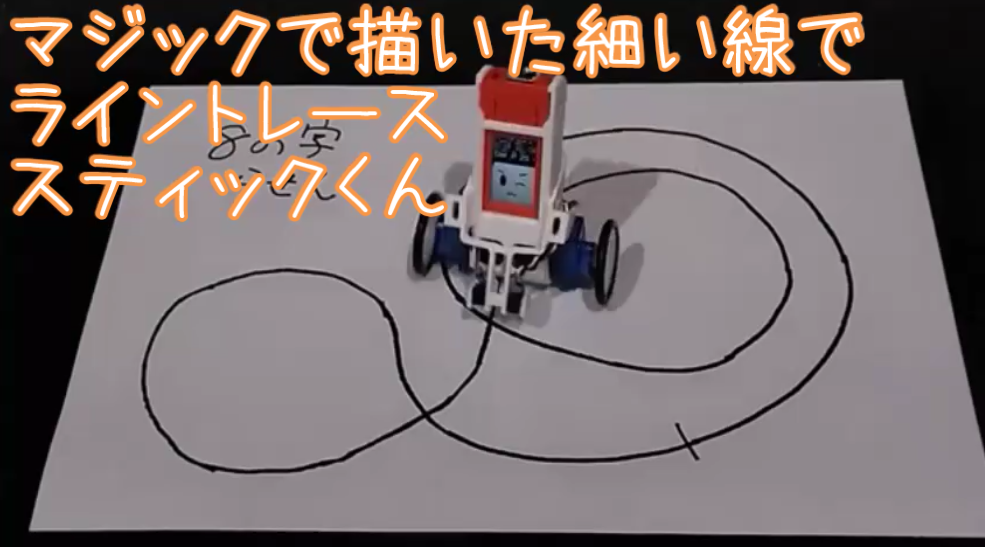
こちらはM5Stick、スティックくんにフォトリフレクタオプション♪をつけた
ライントレースロボ
スティックくんの
— しん_2-41 (@shinichi_nino) 2026年2月1日
ライントレーサー版
こちらは #倒立振子 ロボの
スティックくんhttps://t.co/mwTOq94BsI#M5stack #Arduino #PID制御 pic.twitter.com/31lCOJGA4y
ここ最近。。。
よく説明して来たのは倒立振子ロボ スティックくん
去年のInterface 9月号で特集記事 書きました♪
それなり好評だったようです♪
展示会等々では 買ったよ!、作ってみた! の話多くいただきました。
Xとかでも読者が作ったモノたくさん紹介いただいた。
ありがとうございました。
で・・・
倒立振子ロボ、 制御工学を学ぶ では結構な定番で出てきます。
でも、倒立振子はかなり 実践的?技術が必要になる人向けかも・・・っての
あります。 割と難しい方かなと。
特に、スティックくんは自分が今まで見てきた 倒立振子ロボ では
見た目とは真逆で 超難しい...部類です。
倒立振子ロボ、いろんなの今まで作ったことあるのですが・・・
制御工学の学習キットって販売されているものは、
その目的でちゃんと、構成されているので組めばちょっと解説
理解できれば割と簡単に立ちます。
当たり前ですね。
スティックくん、倒立振子ロボに適した部品を使わず、
応答性の悪い安物ラジコンサーボ使って、
十分な速度出せないし、なのに固有振動数高いし。。。
回転角度測るエンコーダも使ってないし。。。
本では詳しくは書かなかったけど、
PID制御のパラメータ、係数チューニングって
「センス」? 経験値みたいなのが必要です。
慣れてきたら、、、同じ不安定な振動状態でも
あー比例ゲインがきつすぎ、 微分が足りん感じかなー とか
感覚でわかるのですが、これは解説書読んでも難しい。
仕事や工作で新規制御モノの動きでうまくいってない時
たいてい、自分の場合はそれがなんとなくわかります。
これがわからないと係数調整がラッキーで当てはまらないと
安定状態に収束しない。
Interfaceに特集書く前にもいくつもの大学でPID制御学ぶのに
お手軽な費用で、卓上で学習できるよって紹介したけど
誰もできたって人がいない。
東大でもPID制御で紹介したけど、しばらくしてから聞いたら
できんかった・・・って言われた。 たっぷり時間は掛けたわけじゃないけど。
真剣にやれば彼らはできちゃうと思うけど、ちょっとやったくらいでは
できんかったみたい。
トランジスタ技術・・・は表紙の上に
エレクトロニクスの総合誌 って書かれてて、
Interface は ・・・は表紙の上に
テクノロジ専門紙 って書かれてます。
でも、、、Interface 読む人。。。の層、
けっこう専門技術の勉強したい人が多いそう...なのだけど
初心者もけっこういるとのこと。
ということで 制御工学を学ぶ でも初歩からのもいいかも となった。
ってことで最初のスティックくんでのライントレースロボ です。
思いつくこといろいろ書いてると
話が飛んでるけど・・・
倒立振子ロボ、「スティックくん」教えられた係数、
入れれば立つけど いじったらすぐ倒れる。
いじった時の傾向みるとこまでいくのも難しいって話も聞いた。
そうなんです、スティックくんは倒立振子ロボ教材モノにくらべると、
係数感度がめちゃ高いです。
なので、見た目とは違って難しいってなる。
まず立たない状態に簡単に行ってしまうので
パラメータの影響の程度見るとか全然まともにできないって。
ということで、 制御センスを身に着ける なら
倒立振子ロボで学ぶ制御 の前に、
ライントレースロボで学ぶ制御 はどうだろう。。なんです。
係数を制御が全く聞かない状態から、
だんだんライントレースしていく過程とか、
ゲインを上げ過ぎると振動が大きくなっていずれ発散して破綻・・・の
過程が落ち着いて観察できます。
ってことで最初の ライントレースロボ なんです。
ただ、、、ライントレースロボ もやはりそれはそれで奥が深いです。
その動画では単にライントレースそのものでは動いていません。
ラインの逸脱処理が働いての動作が効いてます。
最小回転半径より小さなRでのラインでは、
見失ったラインを探す・・・が働いてます。
以前紹介したM5のAtomS3のライントレースロボでは
小さくて見失ったり、線が切れてる場合
超信地旋回動作で探したり、線端検出で引き返したり・・・
ライントレースロボもいろいろ面白い制御はできます。
倒立振子ロボでライントレースロボは
PID制御が多重に使って、不連続領域での条件分けがあったり
これになると 仕事で普段の制御モノより難しいです・・・
倒立振子ロボ で
— しん_2-41 (@shinichi_nino) 2023年11月17日
ライントレース♪
スティック君は#回転センサ は無く、 #サーボ 流用の#倒立振子 なので速度が遅く
微妙にバックが混ざり、センサ位置振れがあり
場合分け多くて
制御は面倒なんです・・・#M5Stack #M5StickC #Arduino #PID制御#ライントレーサー #ライントレース#IMU pic.twitter.com/mlWFvG4zoo
どんな風に分けて説明がいいかなって思案中・・・